Publications
2025
2025
-
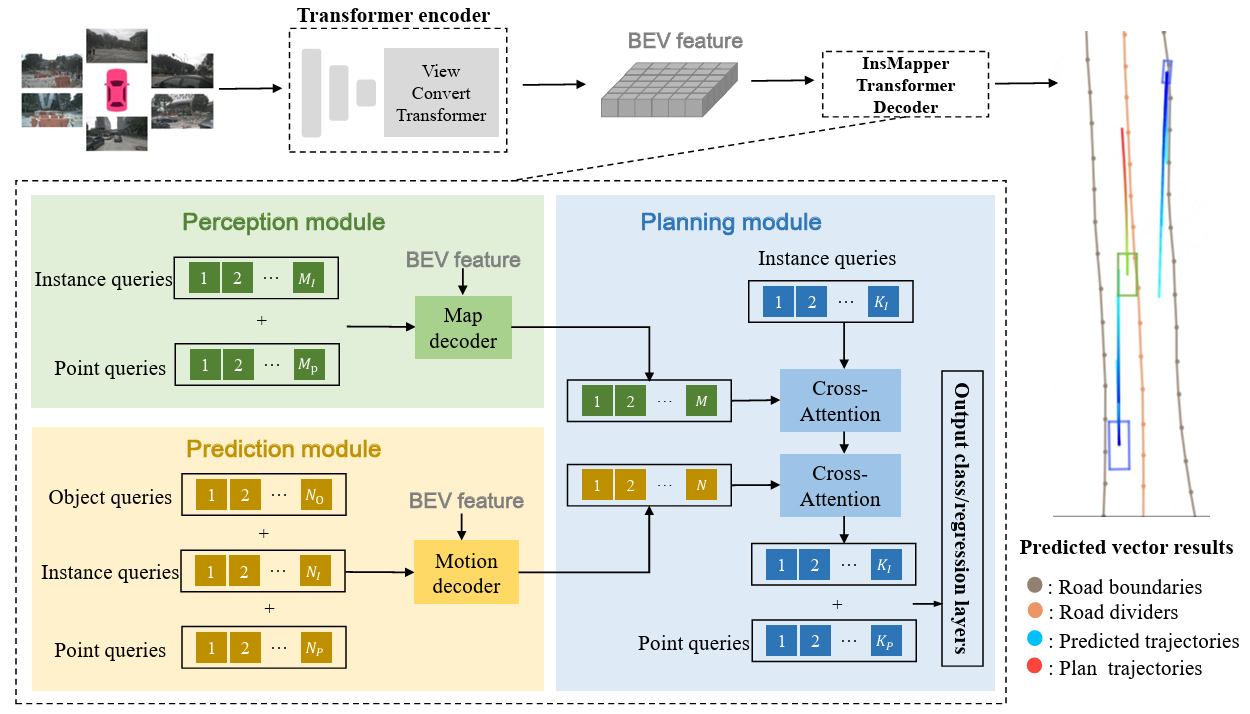 JICV InVDriver: Intra-Instance Aware Vectorized Query-Based Autonomous Driving TransformerJournal of Intelligent and Connected Vehicles, 2025
JICV InVDriver: Intra-Instance Aware Vectorized Query-Based Autonomous Driving TransformerJournal of Intelligent and Connected Vehicles, 2025 -
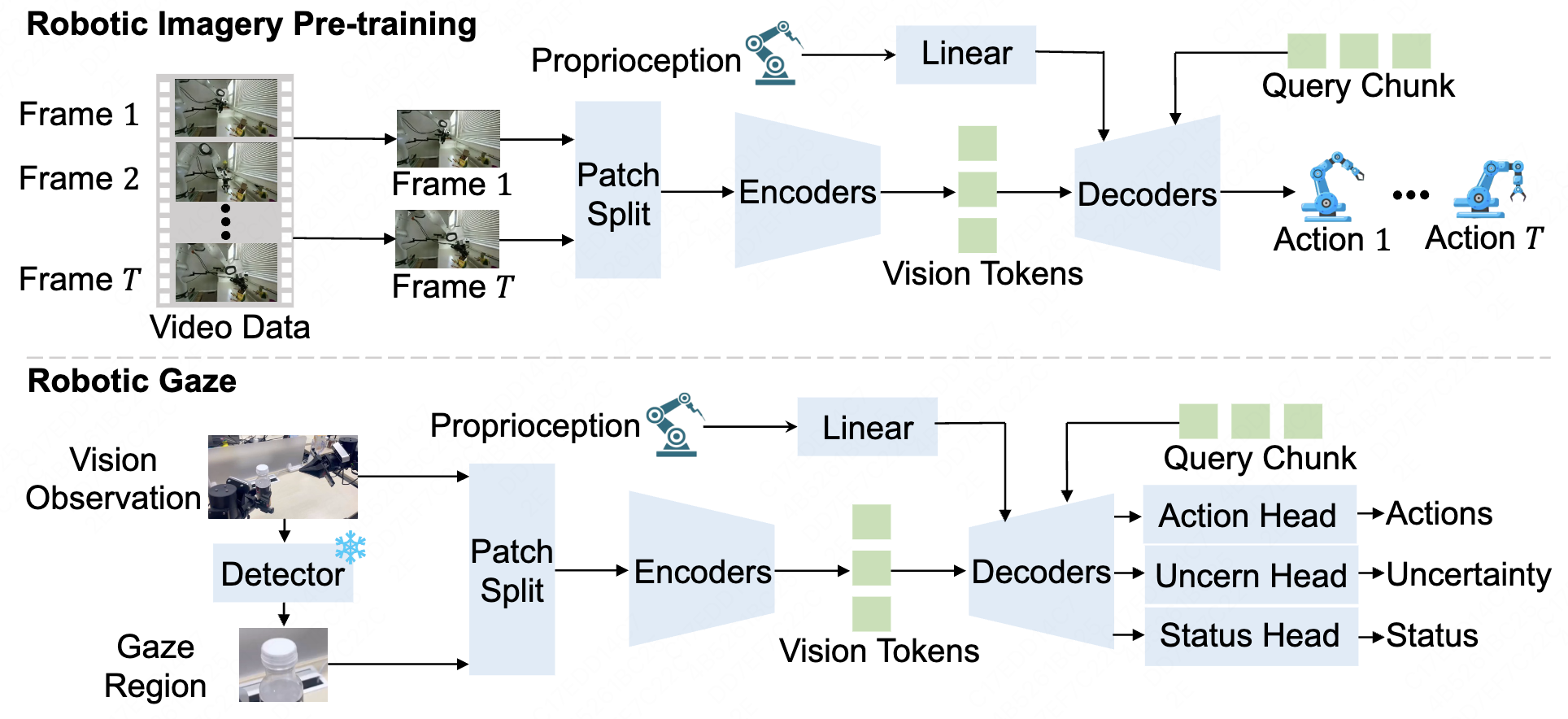 ICML VIRT: Vision Instructed Transformer for Robotic ManipulationInternational Conference on Machine Learning, 2025
ICML VIRT: Vision Instructed Transformer for Robotic ManipulationInternational Conference on Machine Learning, 2025 -
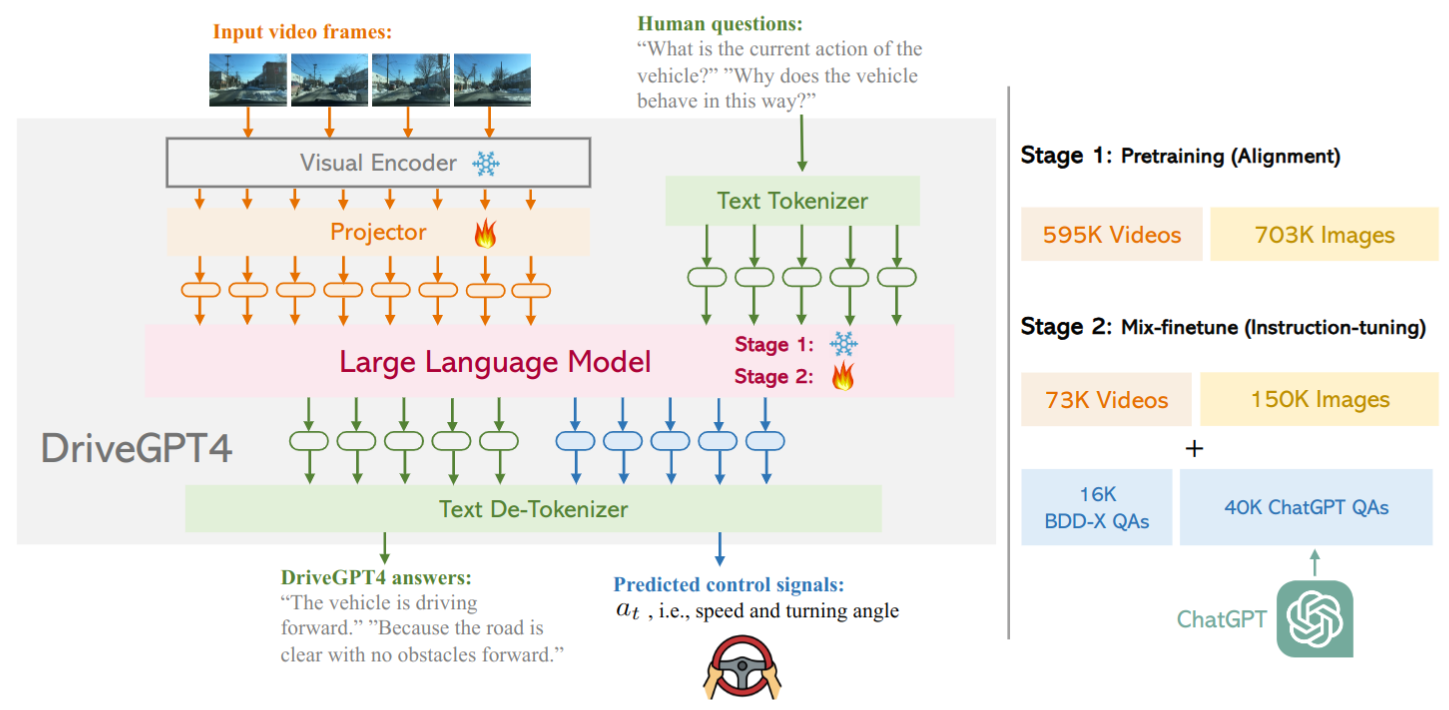
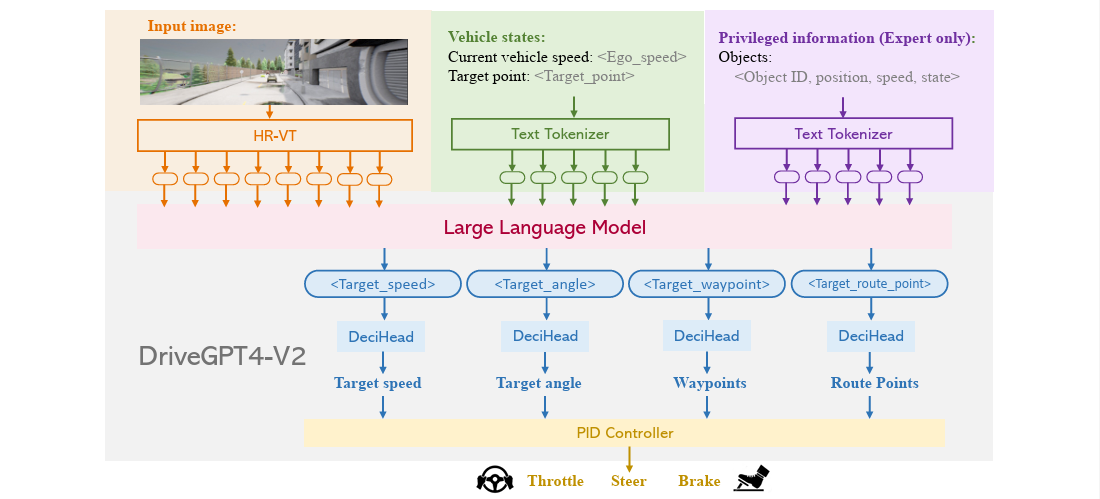 CVPR2025 DriveGPT4-V2: Harnessing Large Language Model Capabilities for Enhanced Closed-Loop Autonomous DrivingConference on Computer Vision and Pattern Recognition, 2025
CVPR2025 DriveGPT4-V2: Harnessing Large Language Model Capabilities for Enhanced Closed-Loop Autonomous DrivingConference on Computer Vision and Pattern Recognition, 2025
 ICML
ICML 2024
2024
- IV2024PGO-IPM: Enhance IPM Accuracy with Pose-guided Optimization for Low-cost High-definition Angular Marking Map Generation2024
 RAL
RAL 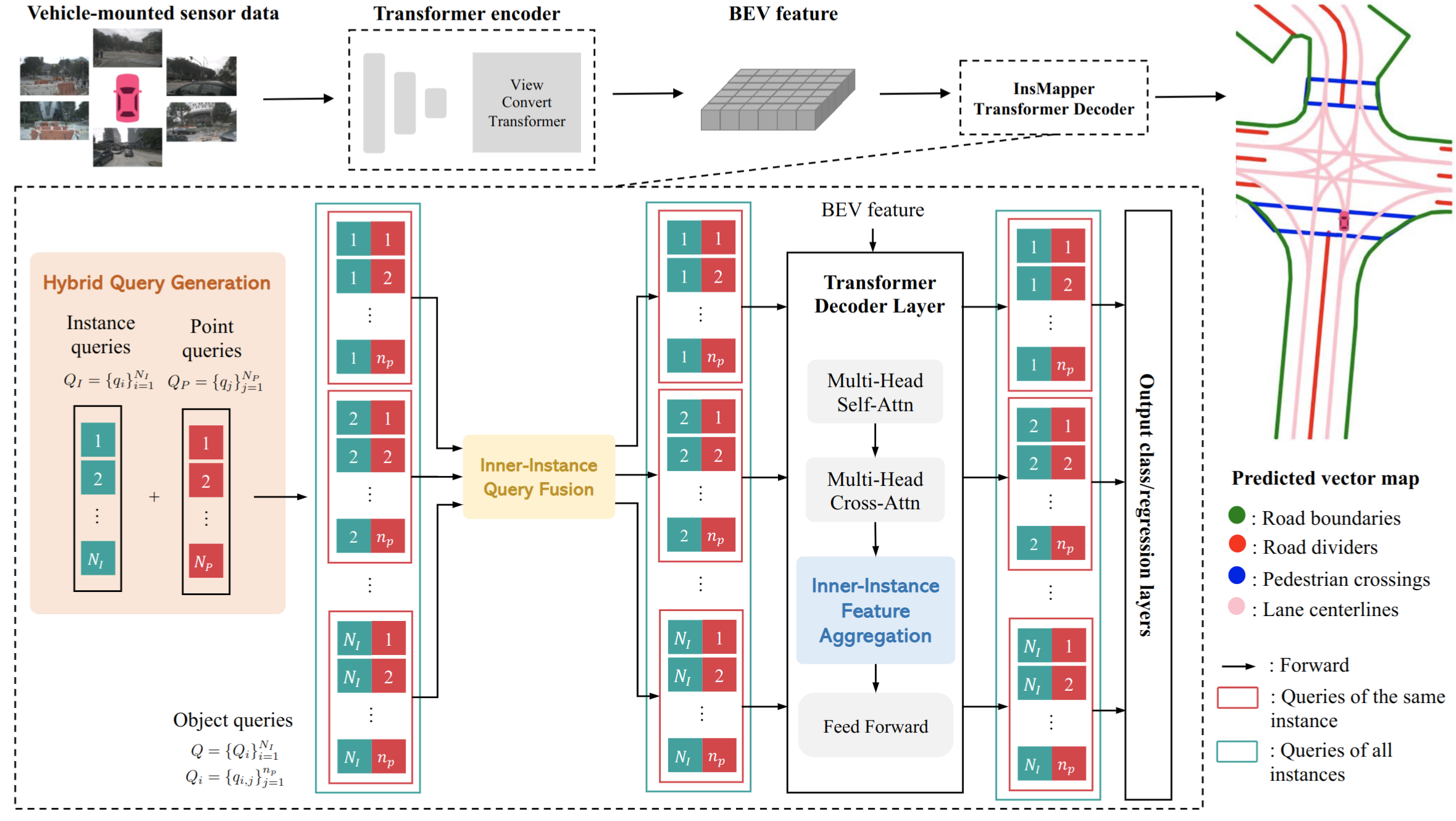 ECCV2024
ECCV2024 2023
2023
-
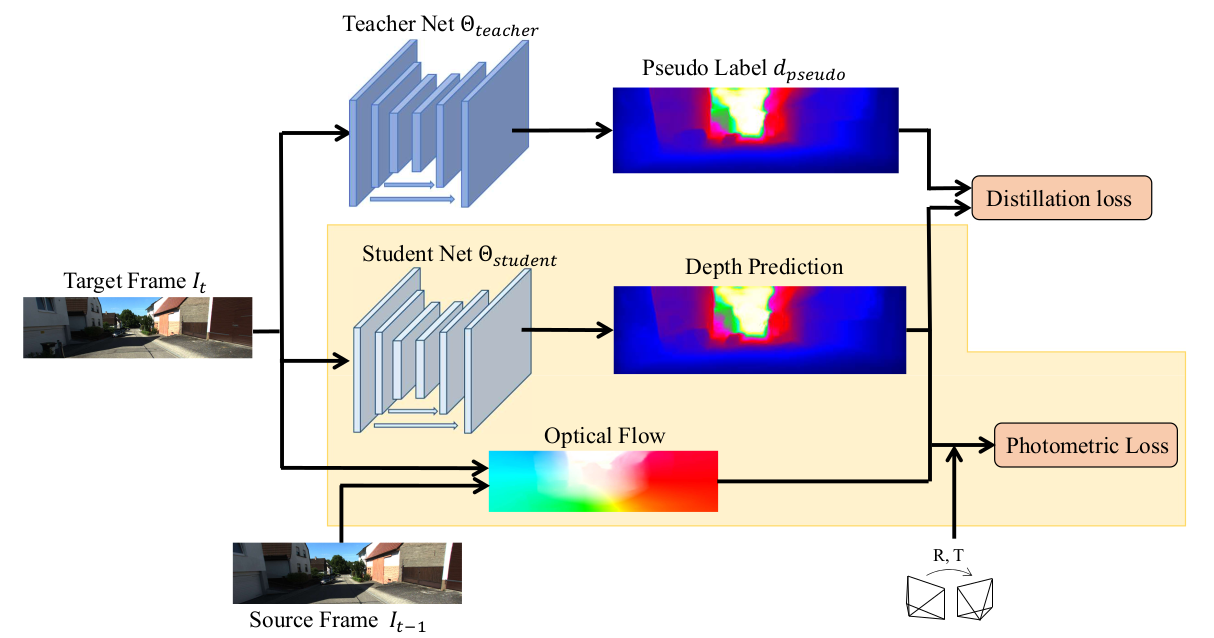 TASE/ICRA2024 FSNet: Redesign Self-Supervised MonoDepth for Full-Scale Depth Prediction for Autonomous DrivingIEEE Transactions on Automation Science and Engineering, 2023
TASE/ICRA2024 FSNet: Redesign Self-Supervised MonoDepth for Full-Scale Depth Prediction for Autonomous DrivingIEEE Transactions on Automation Science and Engineering, 2023
 RAL
RAL  ICRA2023
ICRA2023 2022
2022
-
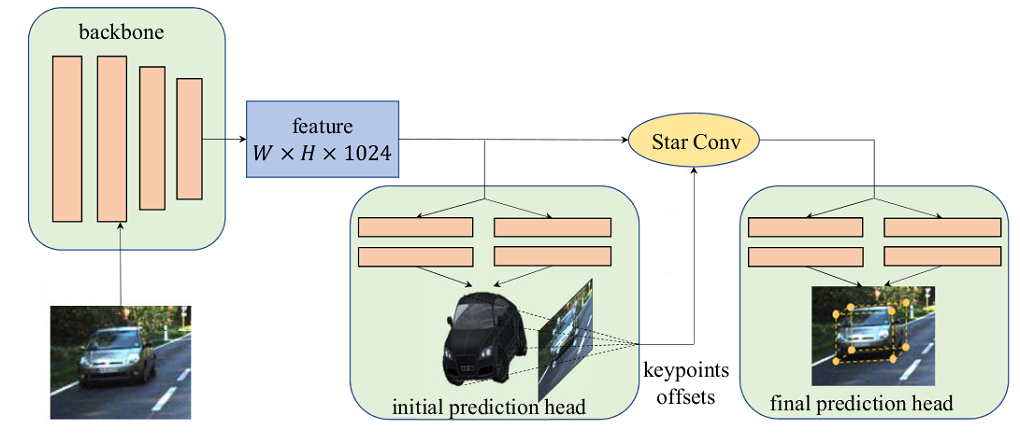 ICRA2022 Star-Convolution for Image-Based 3D Object DetectionIn 2022 IEEE/RSJ International Conference on Robotics and Automation (ICRA) , 2022
ICRA2022 Star-Convolution for Image-Based 3D Object DetectionIn 2022 IEEE/RSJ International Conference on Robotics and Automation (ICRA) , 2022
 TGRS
TGRS  RAL/ICRA2022
RAL/ICRA2022 2021
2021
 IROS2021
IROS2021  RAL/ICRA2021
RAL/ICRA2021  RAL/IROS2021
RAL/IROS2021  RAM
RAM 2020
2020
 TVCG
TVCG 2018
2018
-
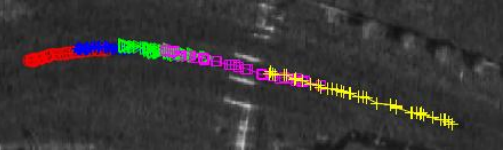 IGARSS Shadow tracking of moving target based on CNN for video SAR systemIn IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium , 2018
IGARSS Shadow tracking of moving target based on CNN for video SAR systemIn IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium , 2018
2017
2017
-
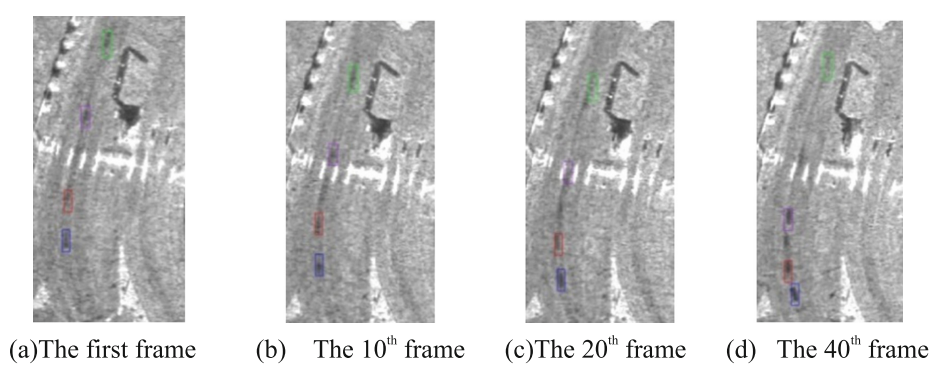 ICCSPS A new shadow tracking method to locate the moving target in SAR imagery based on KCFIn International Conference in Communications, Signal Processing, and Systems , 2017
ICCSPS A new shadow tracking method to locate the moving target in SAR imagery based on KCFIn International Conference in Communications, Signal Processing, and Systems , 2017