Zhenhua Xu

Hello, this is Zhenhua Xu(许振华). Currently I work as a postdoc in the University of Hong Kong (HKU) with Prof. Hengshuang Zhao.
I received my Ph.D. from the Computer Science and Engineering (CSE) Department of the Hong Kong University of Science and Technology (HKUST), where I was co-supervised by Prof.Ming Liu and Prof.Huamin Qu. Prior to joining HKUST, I obtained my bachelor degree in Electronics and Information Engineering from Harbin Institute of Technology, under the supervision of Prof. Yun Zhang.
My primary research interests encompass a broad range of topics, including embodied AI, autonomous driving, multimodal language models, end-to-end vehicle planning, high-definition mapping, GIS imitation learning, and more. My specific focus is on the application of computer vision and robotics techniques to develop robust and dependable autonomous driving systems and agents that seamlessly integrate into our daily lives. The core challenges lie in empowering AI agents to accurately comprehend their surroundings and make well-informed decisions accordingly.
Drop me an email if you are interested in these topics. Collaborations in any forms are welcomed!
News
| Jan 15, 2024 | One paper is accepted by ICRA 2024. |
|---|---|
| Apr 03, 2023 | One paper is accepted by IEEE Transactions on Automation Science and Engineering (TASE). |
| Mar 01, 2023 | Our paper RNGDet++ is accepted by IEEE Robotics and Automation Letters (RA-L). |
| Jan 17, 2023 | Our paper CenterLineDet is accepted by ICRA 2023. |
| Jan 06, 2023 | Pass my Ph.D. thesis defence. |
| Jun 03, 2022 | Our paper RNGDet is accepted by IEEE Transactions on Geoscience and Remote Sensing (TGRS). |
| Feb 07, 2022 | Our paper csBoundary is accepted by IEEE Robotics and Automation Letters (RA-L) and ICRA 2022. |
| Feb 01, 2022 | One paper accepted by IEEE International Conference on Robotics and Automation (ICRA) 2022. |
 Preprint
Preprint  Preprint
Preprint  RAL
RAL  ICRA2023
ICRA2023 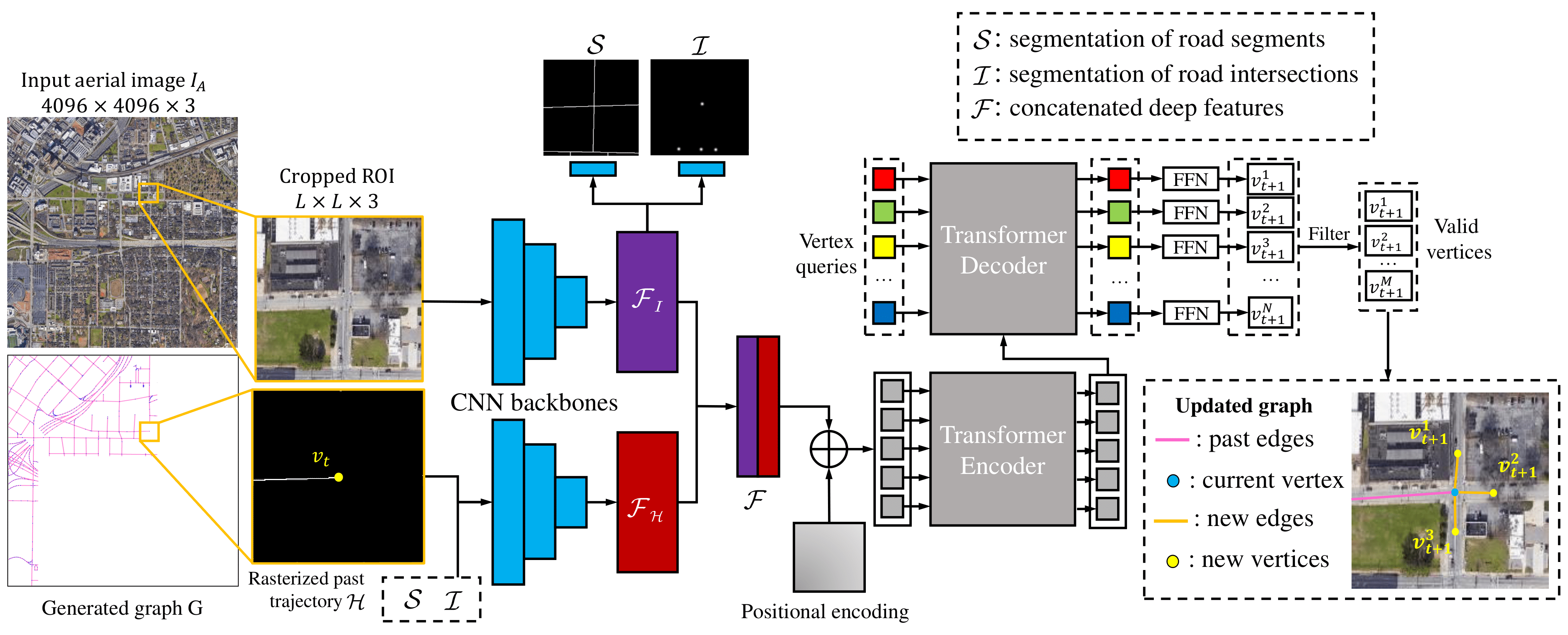 TGRS
TGRS 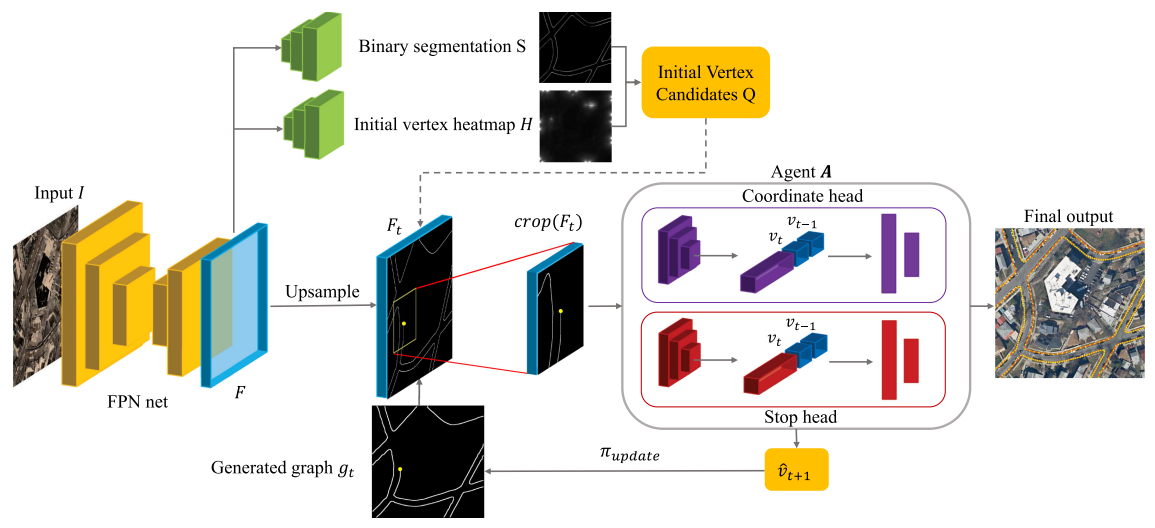 RAL/IROS2021
RAL/IROS2021